
Ein Laufroboter, ein Pferd und ein Dackel haben auf den ersten Blick nicht viel gemein. Durch die Brille der Biomechanik betrachtet ist das anders. „Alle drei sind eine Masse auf Federn“, sagt David Remy, neuer Professor am Institut für Nichtlineare Mechanik der Universität Stuttgart. Er studiert die Bewegungsprinzipien von Tieren, um Roboter schneller, agiler, robuster und energieeffizienter zu machen.
„Unser Ziel ist es, Roboter zu bauen, die entweder selbst laufen oder als Trainingssysteme in der Rehabilitation den Menschen bei der Genesung helfen beziehungsweise Funktionalitäten ganz übernehmen, zum Beispiel als aktive Prothesen oder Exoskelette“, skizziert Remy sein Forschungsfeld. Das besondere Augenmerk des 39-Jährigen gilt den unteren Extremitäten, also Robotern, die beim Laufen unterstützen. Prothesen in diesem Bereich waren – Beispiel Holzbein – über viele Jahre hinweg passiv. Später kamen einfache Gelenke und Federn hinzu, und auch optisch wurden die Prothesen dem menschlichen Bein ähnlicher. Die Funktionen von echter Muskulatur und Gelenken können sie jedoch nicht übernehmen. „Das macht das Laufen anstrengend und die Menschen sind weniger mobil, mit allen nachgeordneten Konsequenzen für die Gesundheit“, erklärt Remy.
Stark im Kommen sind daher aktive Prothesen. Diese sind mit Motor, Computer, Sensoren und Reglern ausgestattet und übernehmen bestimmte Funktionalitäten selbst. Das Problem dabei nennt sich Slacking (nachlässig werden): „Der Mensch ist faul. Wenn das Exoskelett arbeitet, macht der Körper Pause“, lacht Remy. Prothesen der Zukunft sollen daher adaptiv werden. „Wir entwickeln Algorithmen, mit der eine Prothese lernt, sich dem Benutzer anzupassen und auszuprobieren, was ihm am besten nutzt“. ‚Assistance as needed‘ lautet die Vision, nach der ein System die Unterstützung aktiv zurückfährt und die Eigenleistung des Patienten anregt, wenn der Gesundungsprozess voranschreitet oder der Träger gelernt hat, mit der Prothese umzugehen.

Energiesparen als archaisches Prinzip
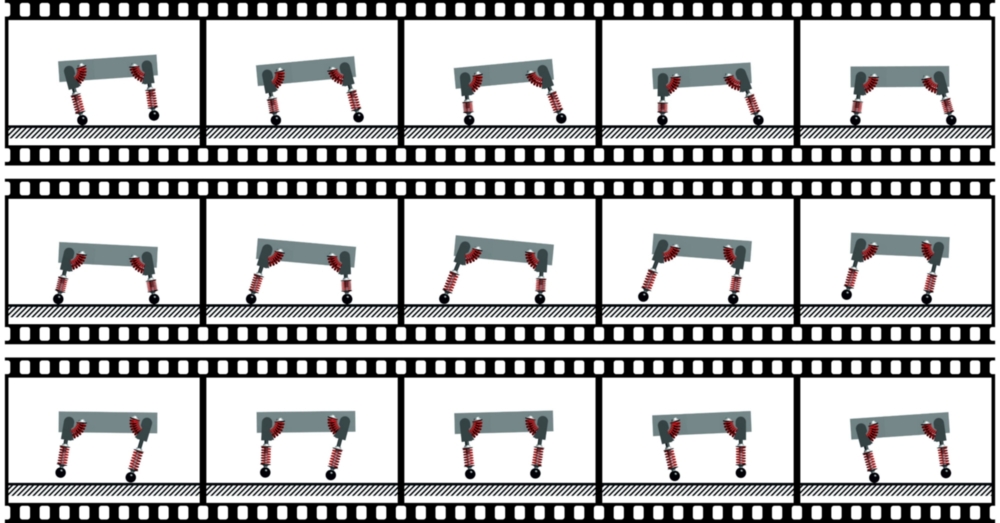
Menschliche Faulheit entspricht einem archaischen Prinzip, das einst lebensnotwendig war und sich in allen natürlichen Bewegungsabläufen niederschlägt: dem Einsparen von Energie. Deshalb ändern Mensch und Tier bei steigendem Tempo ganz automatisch die Gangart, ein Pferd zum Beispiel vom gemächlichen Schritt zunächst in den Trab und dann in den sprichwörtlich fliegenden Galopp. Die Ursache dafür steckt in der mechanischen Dynamik: ein unterschiedliches Zusammenspiel von Pendelbewegungen in den Beinen und elastischen Bewegungen in den Muskeln und Sehnen, die wie Federn komprimiert und wieder entlastet werden. Im Schritt setzen die Pferdebeine nacheinander auf und werden je zweimal komprimiert, im Trab paarweise mit einer kurzen Flugphase und nur einer einzigen Kompression. Im Galopp kommt eine Knickbewegung der Wirbelsäule hinzu, wodurch in der Flugphase die Hinterbeine die Vorderbeine quasi überholen. Das vergrößert die Wegstrecke, die mit einer Beinlänge zurückgelegt werden kann, enorm.
Durch das gezielte Ausnützen dieser mechanischen Effekte kann man Energie sparen. Zum Beispiel wird bei der Kompression Energie gespeichert, die bei der Entlastung wieder verwendet werden kann. Eben diese technischen Aspekte machen die Bewegungsstudien für den Roboterbau interessant. „Wir bauen in Modellen von Robotern an bestimmten Stellen Federn ein, energiespeichernde elastische Elemente, und ermitteln per Computer, welche Bewegungsart bei einer vorgegebenen Geschwindigkeit am energieeffizientesten ist. Das Ergebnis der bis zu dreiwöchigen Rechenarbeit: Der Computer schlug auf Basis der physikalischen Daten genau die gleichen Bewegungsprinzipien vor, deren sich auch die Natur bedient: Gehen, rennen…
Richtlinien für den Roboterbau
Solche Erkenntnisse erlauben es, Richtlinien für den Roboterbau zu formulieren. „Fragt man zum Beispiel, ob ein Roboter eine biegsame Wirbelsäule braucht, so weiß man nun, dass sich der Einbau einer Feder dort nur bei hohen Geschwindigkeiten lohnt“, resümiert Remy.
Humanoide Roboter ruckeln bisher allerdings noch als recht starre Wesen durch die Gänge, Energieeffizienz steht hier angesichts vorgelagerter Forschungsfragen noch nicht im Fokus. „Doch wenn wir zehn Jahre nach vorne schauen, wird das Thema kommen“, ist Remy überzeugt, „und das wird dann auch wirtschaftlich interessant.“ Firmen wie Boston Dynamics beschäftigen sich damit schon heute: Das amerikanische Robotik-Unternehmen machte jüngst Schlagzeilen mit einem Atlas-Roboter, der im Laufschritt eine Hindernisbahn bewältigt.
Rückkehr nach 13 Jahren Ausland
David Remy hat an der Universität Stuttgart Technische Kybernetik studiert, an der ETH Zürich promoviert und zuletzt an der University of Michigan/USA gelehrt. Nach insgesamt 13 Jahren im Ausland kehrt er nun an die Universität Stuttgart zurück. Der Wechsel wird im Rahmen des Rückkehrprogramms GSO/CZS, einer gemeinsamen Initiative der German Scholars Organization und der Carl Zeiss-Stiftung, mit rund 120.000 Euro gefördert. An Stuttgart reizen ihn die Möglichkeiten der Vernetzung mit dem Cyber Valley, dem Max Planck Institut für Intelligente Systeme, dem Exzellenzcluster SimTech sowie den Robotik-Unternehmen in der Region.
Besonders freut Remy sich, den Lehrstuhl des emeritierten Arnold Kistner zu übernehmen, jenem Professor, der einst seine Masterarbeit betreut hat. Aber auch die persönliche Atmosphäre in der Community der Technischen Kybernetik habe ihren Reiz, meint Remy: „Das Fach hat den Ruf, ‚sackschwer‘ zu sein, aber das hat auch etwas Positives: Wer das macht, der will es wirklich.“